COLIN KWOK ENGINEERING PORTFOLIO
Line Following Robot
Executive Summary
The goal of this project was to develop a robot to collect cubes in a arena. This was done by creating a line following robot using legos and arduino. I developed and calibrated a line following program using PID controller. This project applied my knowledge of controls as well as testing and iterating. My partner and I were able to develop a robot to complete the task.
Image of Final Robot
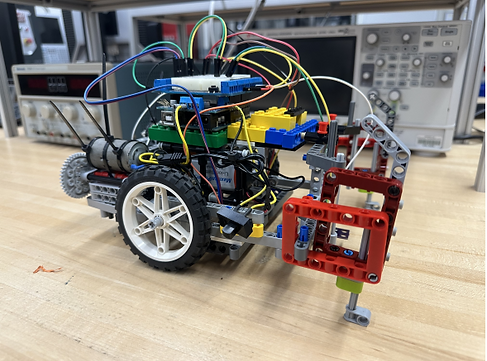
This PID-controlled robot has retractable arms that collects cubes as it line follows through a course. This challenge was challenging in that only two 2-minute attempts were given, meaning lightweight/cleverly selected structural components had to be balanced with carefully modulated gain values.
Below are the relevant specs of our robot:
• Hardware used: Reflective Sensors (3x), Photoresistor (1x),
• Gear Ratio Used: 20.81
• Overall Cartesian Side of Robot: 8.1 inches (width), 10.5 inches (length), 5.5 inches (height)
Note: ”width” refers to the dimension taken when looking at the robot head-on.
• Weight of Robot: 33.14 oz
Flowchart/State Machine Diagram
